Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinThe Location Awareness Engine and Hardware Behind Nanotron’s Real-Time Location System Tracking
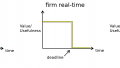
Tracking via a real-time location system (RTLS) has proven important for a variety of industries, including agriculture, manufacturing, traffic management, healthcare, and general location analytics. This article takes a look at a location engine server with ultrawideband functionality and some of the MEMS-based hardware that puts RTLS into action.
Tracking via a real-time location system (RTLS) has proven important for a variety of industries, including agriculture, manufacturing, traffic management, healthcare, and general location analytics. This article takes a look at a location engine server with ultrawideband functionality and some of the MEMS-based hardware that puts RTLS into action.
Applications range from asset management/tracking, logistics planning, collision/obstacle avoidance, monitoring, or data gathering.
However, this can be a challenge. There are many instances where a large number of individual objects need to be tracked, in which case, a scalable solution is necessary. Ensuring location accuracy is another challenge, as well as the general logistics and domain knowledge of how to implement such an infrastructure effectively.
There are efforts out there to try and simplify this process. Nanotron Technologies GmbH, based in Germany and specializing in location awareness technologies, is a company attempting to address these issues. Their NanoLES 3 (Location Engine Server) system combines the benefits of Industrial IoT with Chirp and Chirp over ultrawideband (UWB)-based RTLS, and highlights several use cases.
Image courtesy of Nanotron.
Spatial Awareness in RTLS
NanoLES 3 is the engine that supports RTLS, which is paired with hardware UWB anchors that independently report data of whatever object it is associated with. When tracking objects in real time, there are a few different ways one might go about it:
- Presence (0D) Awareness - Presence awareness simply tells us if an object is in the vicinity or not. Where it is exactly might not be important. This is useful in applications like home automation, where you enter a room and want certain things to happen like lights turning on, or the temperature adjusting.
- Tunnel (1D) Tracking - Tunnel tracking tells us if an object is in the line of sight. It might also reveal the distance on that line. This could be used in a situation where you want to keep track of how many people are entering or leaving a building, for example, or the distance of an object.
- Area (2D) Tracking - Area tracking now tells us a little more about the precise location of an object. A location in two coordinates is provided.
- Space (3D) Tracking - Space tracking then tells us the location of an object in three coordinates; the position can be triangulated.
The NanoLES 3 system is capable of tracking objects reporting their location or presence in the above modes in parallel. This is particularly interesting because each mode, 0D to 3D, comes with it’s own level of difficulty and required accuracy. NanoLES 3 utilizes the Received Signal Strength Indication (RSSI) as a way to try and limit the amount of ambiguity in the reported location.
UWB and Chirp vs The World
RTLS can be achieved using a variety of different technologies, including GPS and RFID. Nanotron’s system uses either ultrawideband (UWB) and Chirp-based tags in its RTLS.
Typically, when tracking many objects, a low power and economical solution is most ideal. RFID tags are quite common, since they require no power source, and each tag is easy and cheap to manufacture. The disadvantages are that it has a limited range of only 3-5m.
GPS is another common tracking solution, although this goes in the other direction: GPS tags are expensive, complex, have higher energy requirements, and are susceptible to interference by buildings, tunnels, and poles.
Chirp alone has a range of up to 500m under line of sight conditions. Pairing Chirp with UWB extends the application to its full capabilities with 10cm accuracy in the range of 1m-20m and 1m accuracy for long ranges up to 500m. Nanotron's RF agnostic location engine (nanoLES) supports both technologies running concurrently.
Nantron's Swarm Suite
Nanotron’s swarm bee LE is a Chirp UWB 2.4 GHz radio MEMS module, that has a range up to 500m with an accuracy within 1m, and can also provide acceleration and temperature data.

Nanotron's swarm bee LE. Image courtesy of Nanotron.
The swarm bee ER is a UWB only MEMS radio module with a range of only 20m but trades off for up to 10cm accuracy, and also provides acceleration and temperature data.
Both tags can be integrated with the swarm API, and run on the NanoLES 3 RTLS engine. The engine also allows for bidirectional communication with tags; in addition to location information, telemetry can also be transmitted, or configuration information for sensors sent to the tag.
The NanoLES 3 location data processing also makes use of define box and polygon boundaries which can be used to eliminate outliers or define obstacles. A Kalman filter and motion model uses the maximum Time Difference of Arrival (TDOA) to perform plausibility checks on location data. Metadata can also be parsed from the API in post process using C++, C#, Ruby, and Java.
Anchors added to the RTLS system are automatically authenticated with the swarm API and NanoLES 3 system, and Time of Arrival (ToA) data queues help overcome problems with network delays.
NanoLES 3 is currently available for Windows and Linux platforms
Feature image courtesy of Nanotron.