 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinSyslogic Reveals GNSS Expansion Board for Centimeter-Accurate Navigation
The add-on board, based on U-blox's X20, brings all-band GNSS, RTK, and HAS-ready corrections to Syslogic's embedded platforms.
Syslogic has introduced a GNSS expansion board to add high-accuracy positioning to its rugged embedded computers, targeting mobile and outdoor systems that demand repeatable navigation accuracy. Built around U-blox’s X20 receiver platform and available in single- and dual-receiver configurations, the board enables developers to combine RTK-class positioning with GNSS-based heading on a single module.
Syslogic’s all-band GNSS board. Image used courtesy of Syslogic
The board is an expansion option for Syslogic’s existing x86 and Nvidia Jetson-based systems, reflecting a growing use case across industrial automation, robotics, construction equipment, and autonomous field machinery. In these environments, the problem isn’t whether GNSS is available, but whether it can deliver consistent performance when antennas are mounted on moving platforms or operating near structures, foliage, and earthworks.
All-Band Reception
U-blox’s ZED-X20P all-band GNSS receiver powers this board, thanks to its support for modernized signals across the major global constellations. According to Syslogic, the board tracks GPS L1C/A, L2C, and L5; Galileo E1, E5a, and E6; BeiDou B1I, B1C, B2a, and B3I; QZSS including L6; NavIC L5; and SBAS on L1.
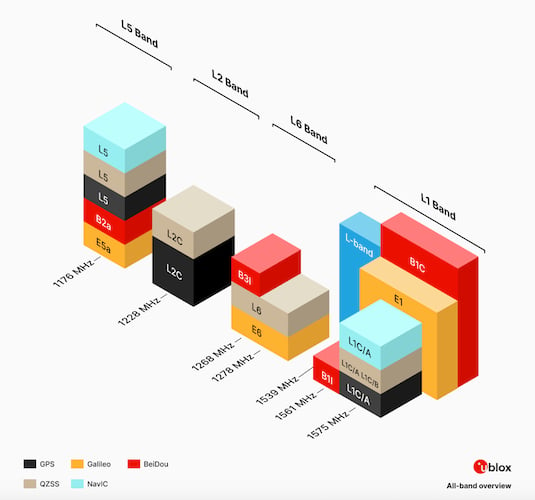
An all-band overview. Image used courtesy of U-blox
This level of multi-frequency tracking allows the receiver to better model ionospheric delay and maintain carrier-phase ambiguity resolution, particularly when signals are degraded. This, in practice, improves availability and convergence behavior when the receiver is operating near obstructions or in mixed urban and industrial settings.
Syslogic also lists a standalone positioning accuracy of 1.2 m CEP, with corrected modes reaching 3 cm to 6 cm under PPP-RTK and 1 cm + 1 ppm CEP when operating with RTK corrections. However, keep in mind that these figures depend on factors such as the correction source, antenna quality, and operating conditions.
Correction Flexibility
One of the board's more notable aspects, by far, is its support for the Galileo High Accuracy Service (HAS). HAS delivers precise point-positioning corrections via Galileo’s E6 signal and the internet, without requiring a private RTK network. This introduces a correction path for embedded systems deployed over large areas that does not depend on a nearby base station.
HAS dramatically lowers the barrier to improved accuracy in scenarios where infrastructure is limited. Syslogic claims HAS delivers decimeter-level accuracy under nominal conditions, placing it between standalone GNSS and full RTK. While HAS isn’t a drop-in replacement for RTK in every application, it does provide a free, globally available correction layer that can materially improve performance when RTK is unavailable or intermittent.
Syslogic has also highlighted compatibility with U-blox’s PointPerfect Global service, which uses PPP-AR corrections delivered by IP or L-band satellite. PointPerfect Global is designed to achieve convergence to under 10-cm accuracy in minutes. Together, HAS readiness and PointPerfect support give system designers multiple options for balancing accuracy and coverage alongside the challenges of operational complexity.
Dual Receivers for Positioning and Heading
Syslogic offers the expansion board in a dual-receiver configuration that integrates a second ZED-X20P. This configuration is intended to support GNSS-based heading without requiring an external heading module. With two antennas mounted at a fixed separation, the system can derive heading directly from carrier-phase measurements, providing an absolute orientation reference even at very low speeds.

ZED-X20P. Image used courtesy of U-blox
This configuration could offer significant advantages for autonomous machines because GNSS-derived heading does not exhibit the same drift characteristics as inertial sensors. It remains usable when vehicle speed is insufficient for reliable course-over-ground estimates. Integrating both receivers onto a single expansion board simplifies wiring and reduces the need for additional GNSS hardware, while still allowing the primary receiver to operate in RTK or PPP-RTK modes.
Crucially, the dual-receiver option does not change the system's underlying correction capabilities. RTK workflows remain available, meaning that this consolidation can simplify timing and synchronization, especially when GNSS data is fused with inertial and vision inputs.
As an expansion board rather than a standalone receiver, the product assumes integration into a broader compute stack. Syslogic’s positioning around Jetson and x86 platforms suggests a target audience that’s already running perception, control, and navigation software at the edge. These users may need GNSS data that can be consumed alongside other sensors without additional adaptation.
This level of flexibility will ultimately lead to fewer hard dependencies in system design. And importantly, it may yield a machine that can be deployed with RTK where available, fall back to PPP-based corrections when connectivity changes, and still benefit from improved accuracy over standalone GNSS.
Related Content












