DARPA’s Subterranean Challenge Tasks Engineers with Communication and Sensor Issues
DARPA’s Subterranean (SubT) Challenge seeks to find new ways to cope with complex underground environments.
You may know that DARPA (the Defense Advanced Research Projects Agency) is a US governmental agency tasked with developing new and creative technologies for warfare.
What you may not know is that this agency is in the habit of issuing challenges to the engineering community.
These challenges ask for design ingenuity regarding a particular specification, such as seeking tiny, versatile robots in the SHRIMP (SHort-Range Independent Microrobotic Platforms) challenge, complete with Olympics-style challenges for the tiny robot competitors.
Back in 2017, DARPA made the call for teams to develop subterranean robotics to compete for up to $2 million by designing and assembling robots that could function underground. They call it the SubT Challenge.
![]()
This August, after years of development, the first wave of actual competition took place.
Let's take a look at why this challenge was sponsored, what bots competed, and who won.
Why Subterranean Robotics?
Subterranean environments pose some of the most dangerous challenges on earth for humans. Limited food and oxygen, tunnel collapses, maze-like cave systems, and oppressing darkness all represent serious dangers to those who work or commute underground. These challenges become logistical nightmares for military and civilian first responders when things go wrong.
To aid in the exploration of subterranean areas and the rescue of people stuck in them, DARPA has requested the development of robotics that can handle three distinct subdomains of "SubT" environments:
- Underground tunnels can extend many kilometers in length and include highly constrained passages, multiple levels, and vertical shafts.
- Natural cave networks often have irregular geological features and unpredictable topologies. They can present the challenges of constrained passages and also massive open areas such as caverns.
- Urban underground environments are more commonly structured (often mapped) and are typically constructed out of human-made materials. But they, too, can have complex layouts that cover multiple stories and/or span large areas of city blocks.
These environments present significant challenges for situational awareness. In time-sensitive scenarios, such as active combat operations or disaster response settings, soldiers and first responders face increased technical challenges including difficult terrain, unstable structures, degraded environmental conditions, severe communication constraints, and expansive areas of operation.
The SubT Challenge
The SubT Challenge seeks to innovate, develop, and finally showcase ways to equip our warfighters and first responders with new technologies and capabilities.
The SubT Challenge is presented in two tracks:
- Systems Track: Teams will develop and demonstrate actual physical robotic systems that will seek out underground targets and report to observers and controllers on the surface. The goal for the systems track team is to find "artifacts" hidden throughout a set testing area using physical robotics in actual courses.
- Virtual Track: Teams will develop software and algorithms for subterranean operations. They will employ virtual models of underground environments and terrain and compete in simulation-based events.

The DARPA SubT Challenge timeline
The virtual portion of the competition was active from July to August. The rest of this article will focus on the Tunnel Circuit subdomain of the Systems Track, which concluded last week.
"Artifact" Hunting
The goal of the Systems Track is to search the given course for "artifacts" hidden throughout. The artifacts are various items that could be found in the given environment.
The Tunnel Circuit included five artifacts:
- A person (a mannequin)
- A backpack
- A cell phone
- A drill
- A fire extinguisher

Image from DARPA's artifact specifications document
The teams can earn points by finding the artifacts through some means of detection and then relaying their location through spatial reference to their surroundings. More accurate readings based on the artifact's localization point earn more points.
Challenges and Issues to Consider in Design
The subterranean robots face several challenges, which DARPA identified in several points in their Tunnel Circuit Rules document:
- Austere Navigation: The challenge courses are expected to include features such as multiple levels, inclines, loops, dead-ends, slip-inducing terrain interfaces, and sharp turns. Such environments with limited visibility, difficult terrain, and/or sparse features can lead to significant localization error and drift over the duration of an extended run.
- Dynamic Terrain: As if navigation wasn't difficult enough, the terrain may actually change as the course goes on, such as if debris were to fall from the ceiling or a section of tunnel were to collapse. DARPA says this will "test the agility of the system autonomy to reason, react, and potentially recover from the possibility of a changing map."
- Degraded Sensing: The darkness of subterranean environments presents plenty of challenges when trying to navigate and identify artifacts. The additional issues of debris, dust, smoke, and other means of obscuring sensor data just makes environmental awareness even more difficult. It should be noted, however, that the challenge does not include extreme temperatures, fire, or hazardous materials such as acids.
- Severe Communication: Perhaps one of the most challenging design elements is that of an effective subterranean communication system. Because they are underground, the bots face difficulties with many of the typical communication systems that would normally be available to them, such as RF. Operators will also not have line-of-sight with their bots. DARPA hoped to see teams develop "novel combinations of hardware, software, waveforms, protocols, distributed or dispersed concepts, and/or deployment methods" to overcome this challenge.
- Terrain Obstacles: These bots need to be rugged! Each robot must be able to negotiate through various obstacles—including inclines, drops, ladders, water, sand, and more!—without falling to pieces.
- Endurance Limits: According to DARPA, the three circuits will run between 60-90 minutes apiece (and the Finals will be even longer, at 60-120 minutes). What DARPA calls "endurance" represents not just the robustness of the robot's physical chassis and ability to move, but also its ability to manage power. This may mean a hyper-low-power design, the ability to carry additional power supplies, the ability to receive transferred power, or the ability to harvest energy. (Perhaps through vibration energy harvesting? There's certainly no opportunity for solar.)
Additionally, due to the extreme issues with communications in this challenge, the robots are expected to accomplish relatively high levels of autonomy for those times in between when an operator will be able to communicate with the system.
Let's meet the competitors who tackled all of these issues!
The Competitors: Tunnel Circuit, Systems Track
There were 11 competitors in August's event, each presenting different solutions to the challenges placed before them.
Team Pluto
Team PLUTO went with massive dipole antennas on the butts of their Ghost Robotics Vision 60 quadrupeds, which improved communication performance by an order of magnitude. The team emphasizes autonomy, and their robots are designed to operate for extended periods without any communications at all, but they do still need to report back on what they found from time to time.
The team came from a collaboration of the University of Pennsylvania, Exyn Technologies, and Ghost Robotics.
Team CERBERUS
The "CollaborativE walking & flying RoBots for autonomous ExploRation in Underground Settings" (say that 10 times fast) or CERBERUS team comes from a collaboration of several institutions and companies (the University of Nevada-Reno, ETH Zurich, UC-Berkeley, the Sierra Nevada Corporation, and Flyability).
CERBERUS, like several other teams, combines walking and flying robotics, with the walking robot (which may be familiar if you're a fan of Boston Dynamics' Big Dog) acting as a perch for the flying unit to save power.

Rendering of CERBERUS's walking unit, with the flying unit on its back, navigating in dark, foggy conditions. Image from Team CERBERUS.
Each utilizes data from cameras, IR vision, LiDAR, millimeter-wave RADAR, and IMU devices for sensing. They utilized ultrawideband communications to send data back and forth between the two systems.
Team Explorer
Communication was key for Team Explorer, which was developed by Carnegie Mellon and Oregon State Universities. Like many of the teams, Team Explorer depends on mesh networks. Not only are the robots themselves each a node in the mesh, but also each robot can deploy up to 10 additional nodes to strengthen the network.

Image from Team Explorer
Team CRETISE
Like Team Explorer, Team CRETISE (Collaborative Robot Exploration and Teaming In Subterranean Environments) drops off auxiliary nodes. But this team takes it a bit further, as the FirstLook robots they deploy are themselves mobile. They travel around as needed to situate themselves wherever the mesh most needs augmentation at any given time.
The CRETISE team is a collaboration of Endeavor Robotics (now part of FLIR) and Neya Systems.
Team MARBLE
Team MARBLE (Multi-agent Autonomy with Radar-Based Localization for Exploration) has been experimenting with the modern equivalent of an 18th Century packet ship. In use before radio communications were invented, packet ships carried actual information from the large mother ship to remote destinations, freeing the larger ship to complete its mission.
Team MARBLE's robot employs tiny robots to physically carry information to the surface. This leaves the main robots free to complete their searches without the costly constraint of maintaining their own communications network.
The team comes from a collaboration of the University of Colorado at both Denver and Boulder, as well as Scientific Systems Company, Inc.
Team CoSTAR
CoSTAR stands for Collaborative Subterranean Autonomous Resilient Robots and was developed in partnership with NASA's Jet Propulsion Lab (JPL), Cal-Tech, MIT, and KAIST University in South Korea.
CoSTAR's approach to this challenge was to develop a team of robots with different strengths. While one bot was a standard ground-based rover, another was what they call a "rollercopter": a rolling bot that can lift off like a drone for vertical passages.
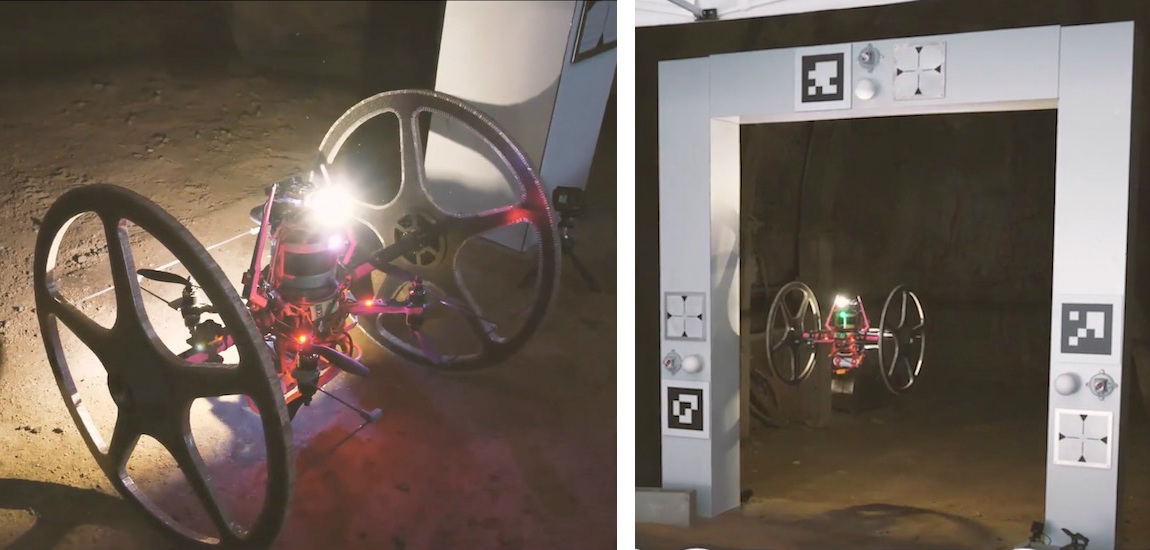
CoSTAR's "rollercopter" at the starting gate on the ground (left) and in the air (right). Image from DARPAtv
The CoSTAR team's navigation systems rely on disruption-tolerant networking using magnetoquasistatic systems.
The Winner
The winner was Team Explorer, which came as little surprise as they were in the lead since the first day.
The factors that stood out for this most successful group were their robot’s ability to drop off mesh communications nodes, and the solid, indefatigable wheels with which the robot transversed the underground environment.
Congratulations to all of the competitors and especially to Team Explorer! We'll look forward to tracking your progress through the Urban and Cave Circuits through to the finals in 2021!