Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinSilicon Photo Multipliers Take the Mechanical Bulk Out of Automotive LiDAR
Automotive LiDAR faces the challenge of combining long-distance ranging with low-reflectivity targets in harsh environments. SiPMs may be the answer.
Toshiba recently released new technology for deployment in solid-state light detection and ranging (LiDAR) systems. The core of this new technology is Toshiba’s silicon photo-multiplier (SiPM). The SiPM-based system is said to reduce the need for bulky mechanical components in space-constrained LiDAR systems.

Toshiba's new SiPM chip measures 9.5 mm by 9.5 mm. Image used courtesy of Toshiba
How do designers typically use SiPMs in automotive LiDAR? And how might Toshiba's new technology contrast other SiPMs on the market?
How SiPMs Remedy the Constraints of LiDAR
To understand SiPMs, you must first have a grasp of the design challenges associated with LiDAR. LiDAR seeks to enable high-resolution object identification at long range, making it an invaluable system in autonomous vehicle designs. But automotive LiDAR systems face the challenge of combining long-distance ranging with low-reflectivity targets in harsh conditions such as extreme sunlight and snow.

Example of how SiPMs work in a LiDAR system—in this case, the SensL LiDAR system. Image used courtesy of SensL
This is where SiPMs are of use. SensL, a branch of ON Semiconductor focused on SiPMs, explains that SiPMs are low-light sensors that could be the “solution to the sensor challenge of LiDAR for autonomous vehicles.” Manufacturers like SensL and Toshiba feel that SiPMs are an apt solution because they are purpose-built for exact timing, high gain, high sensitivity, low-voltage operation, and immunity to magnetic fields.
A Closer Look at Silicon Photo-Multiplier (SiPM)
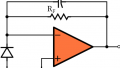
SiPMs consist of hundreds, if not thousands, of self-quenched pixels, each of which possesses an anode, a cathode, and an integrated series-quenching resistor. For practical purposes, many SiPMs consist of pixels in parallel to facilitate the concurrent detection of multiple photons, thereby improving their usability within LiDAR systems.
The pixels themselves function in the Geiger mode reverse-biased condition; when a photon lands on a pixel, an electron-hole pair is generated. One charge carrier then begins a self-sustaining avalanche process, which causes current to flow.
The circuit’s switch also closes when the avalanche process starts; when the quenching happens, the switch opens and the junction capacitor recharges. At this time, the pixel is in its recovery phase and reverts back to its original Geiger mode to prepare to detect a new photon.
Characteristics of SiPMs that may be influenced by circuit design include recovery time of pixels, temperature, photon detection efficiency, and other aspects.
Toshiba's SiPM Reduces Pixel Recovery Time
Traditional SiPMs are highly sensitive to light, and the light-receiving pixels on these SiPMs need time to recover after being activated. During their recovery time, light-receiving pixels are not able to receive new photons.

Toshiba's SiPM compared to conventional SiPMs. Image used courtesy of Toshiba
To mitigate this issue, Toshiba’s SiPMs employ a transistor circuit that efficiently reboots the pixels in order to reduce recovery time, thereby decreasing the number of pixels required to be on a SiPM. This leads to smaller SiPM units, more of which can be arrayed on a limited amount of space, which in turn leads to higher resolution arrays.
How Does Toshiba's Solution Size Up to Its Counterparts?
In a field trial using a LiDAR prototype and widely available lenses, Toshiba says its new system successfully measured objects with at least a 97% success rate over a maximum distance of 200 meters—a four-fold improvement over currently-available solid-state LiDAR systems.
The compact size of Toshiba’s LiDAR system along with its manufacturability with commercially-available lenses may enable it to be placed in multiple locations on vehicles that previously did not easily admit LiDAR units.
Do you work with automotive LiDAR? What design constraints must you work around because of the harsh automotive environment? Share your experiences in the comments below.
Related Content