Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinBuck Converters and Their Cool Applications
The buck converter is a ubiquitous DC-DC converter that efficiently converts a high voltage to a low voltage efficiently. Efficient power conversion extends battery life, reduces heat, and allows for smaller gadgets to be built. The buck converter can be used in lots of cool applications.
The buck converter is a ubiquitous DC-DC converter that efficiently converts a high voltage to a low voltage efficiently. Efficient power conversion extends battery life, reduces heat, and allows for smaller gadgets to be built. The buck converter can be used in lots of cool applications. This article provides a brief introduction to the buck converter and covers a few cool applications of buck converter circuits--and its cousin the half-bridge--and provides links to resources where interested readers can learn more about specific chips to use in their designs.
Introduction to the Buck Converter
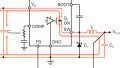
A buck converter is a simple circuit. Figure 1 is a simplified schematic of a buck converter. The MOSFET high side MOSFET turns on and off. A control IC, not pictured, uses a closed feedback loop to control the output voltage. The DC transfer function is an equation that relates the input voltage, output voltage, and duty cycle of the buck converter. $Vout = Vin * D$, where Vout is the output voltage, Vin is the input voltage, and D is the duty cycle, or percentage of the time that the MOSFET is turned on. The inductor and capacitor in figure 1 form a low pass filter. This low pass filter smooths out the MOSFET switching action and produces a nice, smooth, DC voltage.
.jpg)
Figure 1: Simplified Schematic of a Non-Synchronous Buck. The TPS5430 is an example of a non-synchronous buck controller.
Figure 2 shows a common variation of the buck converter: the synchronous buck converter. In a synchronous buck converter, the freewheeling diode is replaced by a MOSFET. Using a MOSFET also allows for bidirectional power transfer. If the buck converter is run backwards, it can be run as a boost converter. This requires a special converter IC. It is used in applications like USB On-the-Go that let you use your smartphone to power small portable electronics.
Two MOSFETs in this arrangement are called a half-bridge. Half-bridges are also very useful circuits that have many applications.
.jpg)
Figure 2: Simplified Schematic of a Synchronous Buck Converter. The LM5119 is an example of a synchronous buck converter controller.
The buck converter is used everywhere. The remainder of the article covers some common applications.
USB On-The-Go
USB On-The-Go allows keyboards, mice, and other peripherals to be connected to a smartphone. The peripheral device draws power from the USB port on the phone. The power regulation is handled using a synchronous buck converter that can transfer power in both directions. When the phone is plugged into a battery charger, the buck converter runs as a buck converter to charger the lithium battery in the phone. When a peripheral is plugged in, the buck converter runs backwards as a boost converter to generate 5V from the lithium battery. Check out these links from Texas Instruments and Linear Technology to learn more about bidirectional dc-dc converters that support USB On-The-Go.

Figure 3: Some popular smartphones.
POL Converter for PCs and Laptops
A Point-Of-Load Converter, or POL, is a non-isolated buck converter that’s capable of efficiently driving power to high current loads. This is especially helpful in PC and laptop motherboards. Modern microprocessors run off very low voltage, typically 1.8V. A synchronous buck, sometimes multiphase, is used for this purpose. This POL is often called a Voltage Regulator Module, or VRM in the motherboard specifications. Muarata makes point-of-load converters, like this one.

Figure 4: A PCB motherboard.
Battery Chargers
Everyone wants their smartphone, tablet, or portable battery pack to charge quickly without heating up their portable devices. A synchronous buck converter is the best way to do this. Typically, a charging port for a mobile device is a micro USB port. It accepts a regulated 5V. The charging circuits are on the inside of the mobile device, which is often a buck converter. Some buck controllers have built-in battery controller smarts, like this chip from Linear Technology.

Figure 5: A laptop
Solar Chargers
Converting a high voltage to a low voltage efficiently is the buck converter’s forte. There are lots of products built to charge a battery from a solar panel with a higher voltage. The solar charger has a feature that other buck converters don’t have called maximum power point tracking. Solar cells have non-linear current-voltage curves. A solar charger is often a buck converter with a microcontroller control. The microcontroller tells the buck converter to draw the maximum amount of power by varying the load current to charge the battery in the shortest time possible. Some buck converters have built-in maximum power point tracking and lithium battery charger smarts, like the LT3652 from Linear Technology.

Figure 6: A foldable solar panel for hikers by GoalZero.
Power Audio Amplifiers
Class D power audio amplifiers power stage is a synchronous buck converter. One big difference between a DC-DC converter and a class D audio amplifier is that while the DC-DC converter produces a fixed DC voltage over line and load, the class D amplifier intentionally produces an AC signal. The difference is in the feedback loop. Notice that the output stage is a half-bridge followed by an LC filter. A good example of a class D amplifier is NXP's TDA8954.
.jpg)
Figure 7: A simplified schematic of a class D amplifier.
Pure Sinewave Power Inverter
Pure sinewave power inverters produce a sinewave from a DC voltage source like a battery. You can use a power inverter to power a household electronic device from a large battery or car. The inversion power stage of a power inverter looks like a class D amplifier.
Quadcopters
Buck converters are used in quadcopters. Quadcopters often are powered from a multi-cell lithium battery pack. typical pack configurations are 2-6 cells in series. These battery packs produce a voltage in the range of 6V-25V. A buck converter drops the battery voltage down to 5V or 3.3V for the flight controller(the brain of the quadcopter) to use. The quadcopter industry often calls buck converters BECs, which is short for battery elimination circuit or UBEC, which stands for universal battery elimination circuit. BECs and UBECs are often found on the electronic speed controllers that drive the brushless motors on a quadcopter, or on a power distribution board, which routes the battery power to where it needs to go.

Figure 8: A quadcopter from Thrust-UAV.
Brushless Motor Controllers
Speaking of quadcopters, quadcopters use brushless motors to fly because of their high efficiency and lightweight. Three half-bridges are used to drive the inductive coils of a brushless motor. See figure 9, a simplified schematic of a brushless motor driver. It looks like 3 synchronous buck converters without filter capacitors. Figure 10 is a picture of an actual electronic speed controller used by quadcopter hobbyists.

Figure 9: A simplified diagram of a brushless motor controller.

Figure 10: An electronic speed controller used by hobbyists. This particular speed controller includes an included buck controller.
The power stages being synchronous allow for power to flow from the motors to the battery. This is a process known as regenerative braking, which is used in trains and electric cars, including the Tesla Roadster.
Brushed Motor Controllers
A brushed motor can be driven using a configuration called high side motor control. It’s basically a synchronous buck converter without an output capacitor.
.jpg)
Figure 11: Simplified schematic of a brushed motor controller. Notice the similarity to the buck converter.
Conclusions
This article has provided a brief introduction to buck converters. Buck converters and their cousin the half-bridge are used in lots of cool applications including smartphones, laptops, tablets, portable battery packs, flashlights, quadcopters. Audio amplifiers and motor control circuits have a great deal in common with buck converters.