Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinLearn About Load-Pull Systems: Passive and Active Tuners
In this article, we explore the types of impedance tuners most commonly used for load-pull measurement—their advantages, their disadvantages, and the methods by which they synthesize impedance.
Load-pull measurement is a general technique that can be used to characterize different performance metrics of any nonlinear RF device. As we discussed in the previous article, one common application of this technique is to determine a power amplifier’s (PA’s) contours of constant output power and efficiency.
In today's competitive markets, load-pull measurements are a standard and essential technique for squeezing the maximum possible performance out of RF devices. For example, the load-pull data might help us improve the efficiency of a smartphone's power amplifier by 20%. This would extend the battery-operated usage time of the device by a similar percentage, and have a huge impact on the customer's experience and satisfaction. To take these measurements, we use load-pull systems.
The term “load-pull system” refers to a test setup that allows us to systematically adjust the load impedance presented to a DUT (device under test) so we can measure the DUT performance for different loading conditions. A basic load-pull system is illustrated in Figure 1.

Figure 1. A basic load-pull system. Image used courtesy of Steve Arar
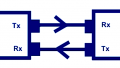
As we can see, tunable matching networks are incorporated to “pull” the termination impedance away from the standard 50 Ω load. Using this setup, the device performance can be experimentally characterized under unmatched, large-signal conditions. A tuner could also be used at the input, either for source-pull measurements or to provide a 50 Ω source impedance (Figure 2).

Figure 2. A basic test setup with tuners at both input and output. Image used courtesy of Steve Arar
While conceptually straightforward, load-pull measurement can be challenging to execute. That’s why today’s automated load-pull systems, which can quickly characterize the large-signal behavior of RF devices, are significantly more complicated than the basic diagrams provided above.
Depending on how they synthesize impedances, we can classify tuners as passive, active, or hybrid. The method of impedance synthesis is among the most important aspects to consider when implementing a load-pull system. This design choice can affect multiple performance dimensions, including:
- The range of achievable impedances.
- The power range.
- The supported bandwidth.
- Harmonic tuning capability.
- Measurement speed.
In the rest of this article, we’ll examine the workings of passive and active load-pull systems, along with the advantages and disadvantages of each type. At the very end, we’ll briefly touch on hybrid tuners, which incorporate both passive and active tuning methods.
Passive Tuners
Passive tuners use mechanical tunable structures to adjust the load termination. Figure 3 shows the most common type of passive tuner—the “slide-screw” tuner.

Figure 3. End and side view of a slide-screw tuner. Image used courtesy of Maury Microwave
A slide-screw tuner consists of a metallic probe at an adjustable distance from a center conductor. The adjustments provide the Y-direction movement depicted in the above figure. The probe is also mounted on a carriage that moves in the X direction along the center conductor. This two-dimensional motion makes it possible to adjust both the amplitude and phase angle of the load reflection coefficient.
Due to its motion in the Y direction, the probe acts as a shunt stub with an adjustable susceptance. The value of the susceptance depends on the ratio of the probe’s displacement from the center conductor and the frequency of operation.
As we might expect, the probe has minimal effect on the impedance of the line when it’s fully retracted. Bringing the probe closer to the line increases wave reflection, which manifests itself as an increase in the amplitude of the produced reflection coefficient.
The magnitude of the reflection coefficient rises as the probe gets closer to the center conductor. However, a physical contact between the probe and the center conductor is undesirable—it can lead to a DC short and serious physical damage. Limit switches are incorporated into the tuner to prevent this from happening.
While the Y-direction position of the probe determines the magnitude of the reflection coefficient, the probe’s longitudinal position affects the reflection coefficient’s phase angle. This is illustrated in Figure 4.

Figure 4. X- and Y-direction movement of a slide-screw tuner’s probe. Image used courtesy of Maury Microwave
To a first-order approximation, the phase of the reflection coefficient is linearly proportional to the probe’s X-direction position. For a full 360 degree adjustment of the phase angle to occur, the length of the tuner must be greater than or equal to λ/2 at the frequency of interest. In other words, the length of the tuner specifies the minimum operating frequency of the tuner. The electrical results of the mechanical motions in the two dimensions are almost independent, which makes working with these tuners easier.
Probe designs fall into two categories:
- Contacting probes, which are designed to touch the structure’s walls.
- Non-contacting probes, which move at a small distance from the walls.
Contacting probes usually don’t exhibit resonances under maximum VSWR conditions, which occur when the probe is at its minimum distance from the center conductor. However, non-contacting probes can provide higher repeatability and long-term reliability.
As a final note, it’s worthwhile to mention that some tuners use two or more probes, both for coarse/fine impedance tuning and for the possibility of implementing a rough control of harmonic frequencies.
Manual vs. Automated Slide-Screw Tuners
In a manual slide-screw tuner like the one in Figure 5, the probe must be hand-positioned.

Figure 5. Manual slide-screw tuner. Image used courtesy of Maury Microwave
There are also slide-screw tuners that automate this process by using precision stepper motors to set the probe’s position. In this way, automated tuners reduce the tuning time and guarantee the position repeatability with a good level of accuracy. Figure 6 demonstrates a test setup using two automated slide-screw tuners.

Figure 6. Test setup using automated slide-screw tuners on the source and load sides of an RF circuit. Image used courtesy of Rohde & Schwarz
The automated version of the slide-screw tuner allows us to characterize the load-pull system and associate scattering parameters to different position settings of the probe. This data is stored in a lookup table, helping us to quickly find the right position for a given impedance.
Advantages and Disadvantages of Slide-Screw Tuners
Even when automated, the passive, mechanical tuning process is still slower than the active loop method we’ll discuss in the next section. Loss presents another problem, as the probe of a slide-screw tuner still causes a small attenuation even when fully retracted. Other components of the measurement setup, such as cables and on-wafer probes, can also add to the overall attenuation.
A portion of the incident energy is wasted as heat, and the tuner can’t reflect all its input energy back. As a result, the maximum achievable reflection coefficient of the tuner might be less than unity. This limits the maximum VSWR that the tuner can generate.
Taking only the tuner losses into account, the magnitude of the synthesized reflection coefficients can vary from roughly 0.9 (at a few GHz) to 0.6 (at a few tens of GHz). Due to the skin effect, the conductor losses increase with frequency.
In other words, using a slide-screw tuner, we might not be able to generate the reflection coefficients that lie very close to the edge of the Smith chart (Figure 7). The limited tuning range of passive tuners can be a big disadvantage when characterizing devices that need very low impedances to perform optimally, such as PAs.

Figure 7. The maximum VSWR for a slide-screw tuner doesn’t quite reach the Smith chart’s edge. Image used courtesy of John F. Sevic
Despite these drawbacks, electromechanical passive tuning remains one of the most commonly used impedance synthesis methods. Passive tuners are simple, robust, and low-cost. It’s also easier to create a passive—as opposed to active—tuner that’s suitable for high-power, high-frequency devices.
Active Tuners
To avoid the losses we described above, active tuners use a different technique for generating the desired reflection coefficient. The active tuner generates a suitable auxiliary signal and injects it into the DUT’s output port, producing the required loading conditions.
Figure 8 shows a basic implementation of this idea. This configuration is sometimes referred to as the feed-forward active-loop impedance synthesis architecture.

Figure 8. Feed-forward active-loop impedance synthesis architecture. Image used courtesy of V. Teppati
In Figure 8, the source signal is split into two different paths:
- One is used to drive the input port of the DUT.
- The other is fed to a variable attenuator and phase shifter to synthesize a traveling wave that is finally injected into the DUT’s output port.
The effective load reflection coefficient for this circuit is:
$$\Gamma_L ~=~ \frac{a_2}{b_2}$$
where a2 is the injected signal and b2 is the outgoing wave.
The injected signal drops if we increase the attenuation, resulting in a smaller reflection coefficient. Since we can adjust the amplitude of the injected wave arbitrarily, we can generate reflection coefficients with a magnitude equal to—or even greater than—unity. This makes active impedance synthesis ideal for situations where probe and cable losses are substantial, such as on-wafer, mm-wave applications.
Note that the reflection coefficient depends on both a2 and b2. Just having a fixed value of a2 doesn’t guarantee a constant ΓL, since other parameters—such as the power available from the source, or the source impedance—can still affect b2. This might be the case when the measurement involves sweeping the input power, for example.
Changes to the DUT’s operating conditions, including the temperature, can change the outgoing wave as well. The attenuator settings should be adjusted continuously to compensate.
Continuously adjusting the attenuation and phase shift settings is an inherently iterative process and can become extremely time-consuming. To circumvent this problem, we can use a feedback active-loop impedance synthesis architecture like the one shown in Figure 9.

Figure 9. Feedback active-loop impedance synthesis architecture. Image (modified) used courtesy of V. Teppati
In this case, the outgoing wave of the transistor is phase-shifted, amplitude-adjusted, and finally injected into the output port of the device. Therefore, the amplitude of the synthesized reflection coefficient is proportional to the loop gain of the feedback path. Since the reflected signal (a2) is derived from the outgoing signal (b2), the synthesized reflection coefficient ideally shouldn’t change with the input drive or DUT’s operating conditions.
The main disadvantage is a potential for oscillation at frequencies where the unity loop gain of the feedback path has a phase shift of 360 degrees. To avoid oscillations, we can add a highly selective Yttrium Iron Garnet (YIG) filter to the loop, thus controlling the loop gain. However, YIG tuning and control isn’t an easy task, and can increase the complexity of the test bench.
Advantages and Disadvantages of Active Tuners
As mentioned above, active tuners can create any value of reflection coefficient on the Smith chart. Because the tuning of an active tuner is an electronic process rather than a mechanical one, it’s relatively fast.
However, these devices are usually larger and more expensive than their passive counterparts. Also, the VSWR and frequency range of active tuners depend on the performance of the feedback path’s PA, especially its peak envelope power capability. As a result, creating active tuners for higher powers at higher frequencies can be difficult.
Wrapping Up: Hybrid Tuners
In this article, we discussed both passive and active impedance tuners. Before we conclude, it’s worth noting the existence of hybrid tuners, which combine a passive tuner and an active tuner into one device. The passive tuner acts as a coarse tuning element, and the active tuner as a finer one.
A hybrid tuner can synthesize higher reflection coefficients than a passive element, while requiring lower injected power than an active tuner. However, whether it’s a superior choice depends on the specific application and requirements.