 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinAll About BLDC Motor Control: Sensorless Brushless DC Motor Controllers
Learn about sensorless brushless DC motor controllers, some example ICs, and some disadvantages of using such motors.
Learn about sensorless brushless DC motor controllers, some example ICs, and some disadvantages of using such motors.
A Quick Review of Brushed and Brushless DC Motors
Brushless DC (BLDC) motors have become extremely popular over their predecessor, the brushed DC motor (see figure below). As the name implies, "brushed" DC motors use brushes, and a commutator, for controlling the movement of the motor's rotor.

Figure 1. Brushed DC motors use brushes and a commutator. Image courtesy of Clemson University.
Again, as implied by its name, brushless DC motors don't utilize brushes; motor movement is controlled by means of carefully designed drive signals. Compared to brushed motors, brushless motors offer improved reliability, longer life, smaller size, and lower weight. BLDC motors have become more popular in applications where efficiency is a critical concern and, generally speaking, a BLDC motor is considered to be a high-performance motor capable of providing large amounts of torque over a wide speed range.
Some BLDC motors use Hall-effect sensors for detecting the position of the motor's rotor with respect to the motor's stator (see Figure 2 below).

Figure 2. BLDC motor using Hall-effect sensors. Image courtesy of Nidec.com.
Other motors don’t have sensors; they’re referred to as sensorless BLDC motors. In place of using Hall-effect sensors for determining the rotor's position and/or speed, a phenomenon called back EMF is employed (see Figure 3 below).

Figure 3. Sensorless BLDC motor control using back EMF. Image courtesy of Microchip (page 4).
Sensorless BLDC Motor Control
Sensorless BLDC motor control—sometimes called sensorless trapezoidal control of BLDC motors—uses back EMF (BEMF) for determining the location of the motor's rotor (the motor's rotating part) with respect to the motor's stator (the stationary part).
A voltage applied across a motor's winding forces the motor's rotor to turn. The movement of the rotor through the motor’s magnetic field, however, is analogous to the behavior of a generator, and consequently the motor not only receives an applied voltage but also generates its own voltage. This voltage is referred to as back electromotive force, or back EMF, and it is proportional to the motor's rotational speed. Back EMF can be used to determine a motor's rotor speed and position—no sensors are required. Controlling a motor by means of back EMF is not a simple task; most sensorless BLDC motors are controlled using a microcontroller, a digital signal processor, or a dedicated driver IC. The figure below shows a typical sensorless BLDC motor driver.
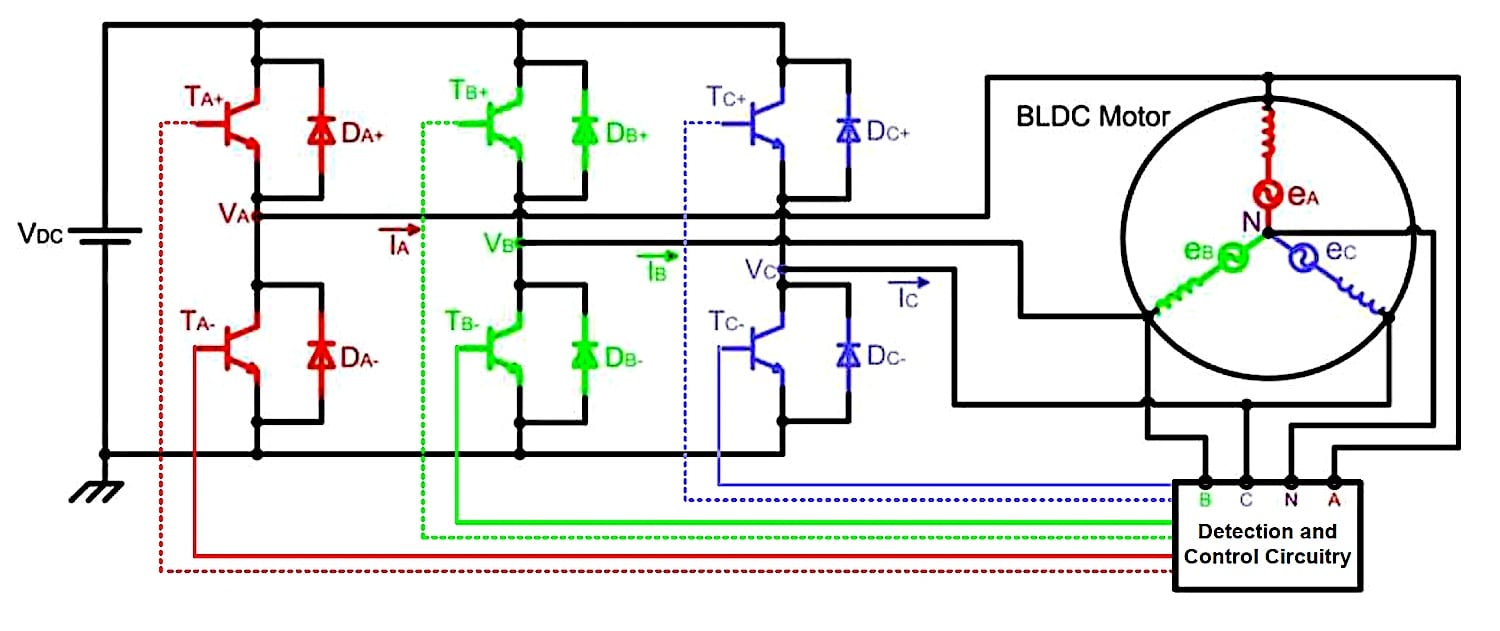
Figure 4. Typical sensorless BLDC motor drive.
The DRV10983 from Texas Instruments is a three-phase sensorless motor driver with integrated power MOSFETs capable of providing a continuous drive current of up to 2 A. It is highly integrated and requires few external components.

Figure 5. TI's DRV10983 Sensorless BLDC motor control driver. Image courtesy of Texas Instruments (page 1).
Not all sensorless BLDC motor controllers have integrated MOSFETs. Consider, for example, the A4964 from Allegro. This part requires the use of external N-channel power MOSFETs; it can operate in conjunction with a microcontroller or as an independent single-chip motor controller.

Figure 6. Allegro's A4964 sensorless BLDC controller can operate either with a microcontroller or as an independent motor controller. Image taken from the A4964 datasheet.
As mentioned earlier, the term trapezoidal is sometimes used when describing sensorless BLDC motor controllers. And when viewing the figure below, it's easy to see why: the voltage waveforms for each of the three motor phases have a trapezoidal shape.

Figure 7. Microchip's AN970 showing Hall-effect sensor waveforms and corresponding back-EMF trapezoidal waveforms. Image courtesy of Microchip (page 3).
Disadvantages of Sensorless BLDC Motor Controllers
When the rotor of a sensorless BLDC motor is rotating, its sensorless scheme can work perfectly. However, this is not the case when the motor's rotor is stationary, and this leads us to one major disadvantage of using sensorless BLDC motors. When the motor's rotor is not turning, no back EMF generated. Without back EMF, the drive circuitry lacks the information it needs to properly control the motor.
For this problem, Texas Instruments offers two solutions as stated in their DRV10983 datasheet (page 17):
- Use the DRV10983's initial position detect (IPD) feature to determine the rotor position "based on the deterministic inductance variation, which is often present in BLDC motors."
- Or, use the align-and-go technique. With this method, a voltage is applied across one of the phases to force the rotor into a known alignment.
Another disadvantage of using sensorless BLDC motors is related to the relationship between back EMF and angular speed. Lower speed means less back EMF, and consequently Hall-effect BLDC motors might be more effective than sensorless BLDC motors in low-speed applications.
In Conclusion
Brushless DC motors offer significant advantages over standard brushed motors. Brushless DC implementations can be sensorless or based on Hall-effect sensors integrated into the motor (a third option is the use of an external angular position sensor). Sensorless systems reduce cost and require fewer interconnects between the driver module and the motor; they can be somewhat complex, but high-performance integrated circuits help to simplify the design task. Though sensorless systems are usually preferable, the use of Hall-effect sensors may be a better choice for low-speed applications.
Featured image used courtesy of Mataresephotos [CC BY 3.0]
Related Content












I’m using ESC circuit to run the compressor motor it uses the pwm technique but the speed doesn’t reached to the expected range. Please suggest what are parameters I has to change to get the maximum speed