 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinSolenoids: Understanding Actuation and Voltage Polarity
This technical brief will explore some fundamental details related to solenoid operation and implementation.
This technical brief will explore some fundamental details related to solenoid operation and implementation.
Related Information
Solenoids are not particularly exotic in their capabilities, and they are not as common as two other members of the electromechanical family, namely, relays and motors. So they are perhaps not as thoroughly understood as they should be, and designers may have a tendency to overlook or avoid them.
Most people who work with electronics probably know that a solenoid is an electromechanical device that uses an inductive winding to convert electrical energy into linear motion. You apply a voltage, the plunger moves. But, as usual, the details are not as straightforward as they might be.
Note: Solenoids come in a rotational flavor as well—rotary solenoids—but we’ll focus on linear solenoids in this article. Also, keep in mind that some solenoids can be driven by an AC supply, but the following discussion assumes DC drive because that is far more likely to be the preference in low-voltage systems.
The Principle
The fundamental operating principle with a solenoid is the following: driving current through the winding causes the plunger to move toward the magnetic field, i.e., into the region enclosed by the winding. Reversing the polarity of the applied voltage does not reverse the direction of movement, because a typical plunger is just a piece of metal (not a magnet), and thus it is always attracted to (not repelled from) the magnetic field.
If gravity or something in your mechanical load does not force the plunger back to its original position, you need a solenoid with a return spring.
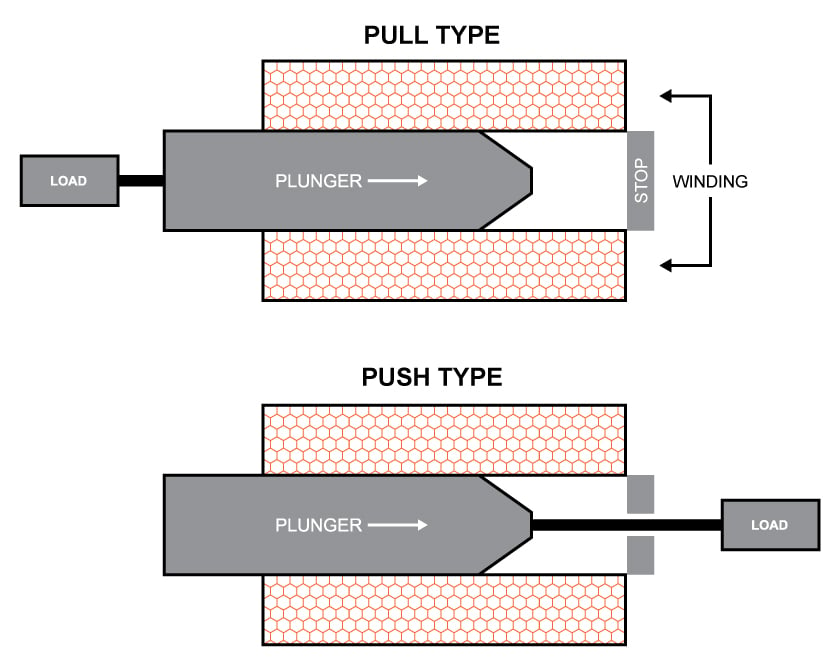
Push or Pull?
Since the plunger always moves toward the winding, the difference between push-type and pull-type solenoids must be based on the hardware attached to the plunger, not the direction of motion relative to the main body of the solenoid:
Release vs. Return
What, then, are we to make of the following diagram, found in a datasheet from Delta Electronics?

You might look at this quickly and think that the solenoid can be returned to its de-energized position by reversing the polarity of the applied voltage, but this violates The Principle.
Notice that the chosen term is “release,” not “return”. The magnetic field does not disappear immediately upon removal of the drive voltage; the current in the winding (essentially an inductor) needs to decay. Thus, the solenoid holds onto the plunger with gradually decreasing strength instead of immediately releasing it.
What Delta is telling us here is that we can achieve faster release by reversing the voltage polarity—you can think of this reversed voltage as more forcefully driving out the winding’s decay current. (Remember that you need to remove the reversed voltage when decay is complete; otherwise, current will start to flow in the opposite direction and you will re-energize the solenoid.)
The significance of this is the following: If you don’t employ polarity reversal, you have ordinary “slow” decay. Slow decay can limit the actuation frequency because the solenoid might still be holding onto the plunger when you re-energize the winding. You have to use polarity reversal and the resulting “fast” decay to maximize the rate at which the plunger can be moved back and forth.
It’s a good idea to keep polarity reversal in mind when you’re designing your solenoid drive circuit. You can easily incorporate this functionality by giving the solenoid an H-bridge driver instead of a single low-side transistor.
Related Content












This is very confusing- The referenced solenoid-DSML-0224-24 is a latching type with a magnet built in, 99% of solenoids do not have this feature.
It’s not at all your garden variety solenoid, that’s what all the confusing stuff about polarity reversal is about in the data sheet.
There is also a return spring, not discussed in article. It appears operation requires duty cycle control to limit current, not mentioned in article.