Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinDC Electric Circuits
DC Motor Control Circuits
9 questions By Tony R. Kuphaldt
-
Question 1 of 9
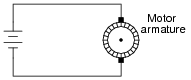
How is it possible to electrically measure the torque output by a permanent-magnet DC motor? Hint: it is very simple, and for large electric motors it involves the use of a shunt resistor. Modify this circuit diagram to include a meter that provides indirect indication of motor torque:
Reveal answer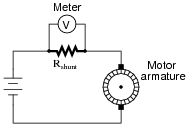
Notes:If some of your students think the “V” symbol in the meter means it is measuring motor voltage, they need to review the purpose and function of a shunt resistor!
This method of measuring motor torque is accurate, so long as the motor is in good condition. Ask your students what they think the meter would indicate if the motor began to develop a low-resistance fault due to carbon dust buildup from the brushes shorting some of the armature current. Would the meter indicate falsely low, falsely high, or would it still accurately register motor torque?
-
Question 2 of 9
What will happen to the stall torque of this DC motor if the “field control” resistor value is suddenly decreased? Explain your answer.

Reveal answerThe motor’s stall torque will increase.
Notes:Your students will most likely have to research the meaning of the phrase “stall torque” before they can answer this question. That is a good thing, though! Begin your discussion on this question with a survey of definitions found for this phrase.
-
Question 3 of 9
What will happen to the counter-EMF of this DC motor if the “field control” resistor value is suddenly decreased (while it is running)?
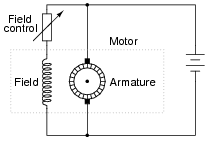
What effect will this change in field excitation do to the operating speed of the motor?
Reveal answerThe counter-EMF will increase, and the motor will slow down.
Notes:In case your students have never heard the word “excitation” used in this context, it would be a good idea to explain it now. The electrical power used to energize a circuit in which a particular output is expected is sometimes referred to as “excitation.” Bridge circuit power supplies are another example of an “excitation” source.
This is a very important, but often misunderstood, aspect of DC motor control. While it seems paradoxical that an increase in power applied to the field winding will cause the motor to slow down, it is indeed true. Ask your students to explain what will happen to the motor speed if the field excitation is weakened.