 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinAnalog Integrated Circuits
Servo Motor Systems
9 questions By Tony R. Kuphaldt
-
Question 1 of 9
Explain the operation of this “H-bridge” motor control circuit:
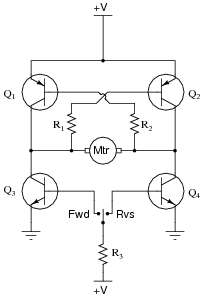
At any given moment, how many transistors are turned on and how many are turned off? Also, explain what would happen to the function of the circuit if resistor R1 failed open.
Reveal answerTwo transistors are on at any given time, and the other two are off. If R1 fails open, the motor will not be able to go in the “forward” (Fwd) direction.
Challenge question: what type of DC motor is this drive circuit designed for? Shunt-wound, series-wound, compound, or permanent magnet? Explain your answer.
Notes:The “H-drive” circuit is a very common method of reversing polarity to a DC motor (or other polarity-sensitive load), using only a single-pole switch. Very, very large electric motor “drives” have been based on this same design.
-
Question 2 of 9
Predict how the motor function in this circuit will be affected as a result of the following faults. Consider each fault independently (i.e. one at a time, no multiple faults):
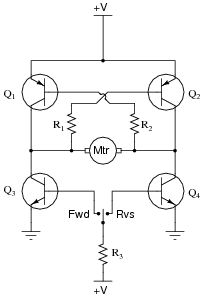
- Transistor Q1 fails open (collector-to-emitter):
- Transistor Q2 fails open (collector-to-emitter):
- Transistor Q3 fails open (collector-to-emitter):
- Transistor Q4 fails open (collector-to-emitter):
- Resistor R1 fails open:
- Resistor R2 fails open:
- Resistor R3 fails open:
- Transistor Q3 fails shorted (collector-to-emitter):
- Transistor Q4 fails shorted (collector-to-emitter):
For each of these conditions, explain why the resulting effects will occur.
Reveal answer- Transistor Q1 fails open (collector-to-emitter): Motor fails to turn in “reverse” direction, can still turn in “forward” direction.
- Transistor Q2 fails open (collector-to-emitter): Motor fails to turn in “forward” direction, can still turn in “reverse” direction.
- Transistor Q3 fails open (collector-to-emitter): Motor fails to turn in “forward” direction, can still turn in “reverse” direction.
- Transistor Q4 fails open (collector-to-emitter): Motor fails to turn in “reverse” direction, can still turn in “forward” direction.
- Resistor R1 fails open: Motor fails to turn in “forward” direction, can still turn in “reverse” direction.
- Resistor R2 fails open: Motor fails to turn in “reverse” direction, can still turn in “forward” direction.
- Resistor R3 fails open: Motor cannot turn in either direction.
- Transistor Q3 fails shorted (collector-to-emitter): Motor turns in “forward” direction even when the switch is in the center (off) position.
- Transistor Q4 fails shorted (collector-to-emitter): Motor turns in “reverse” direction even when the switch is in the center (off) position.
Notes:The purpose of this question is to approach the domain of circuit troubleshooting from a perspective of knowing what the fault is, rather than only knowing what the symptoms are. Although this is not necessarily a realistic perspective, it helps students build the foundational knowledge necessary to diagnose a faulted circuit from empirical data. Questions such as this should be followed (eventually) by other questions asking students to identify likely faults based on measurements.
-
Question 3 of 9
If the ends of a wire loop are attached to two half-circular metal strips, arranged so that the two strips almost form a complete circle, and those strips are contacted by two “brushes” which connect to opposite poles of a battery, which way will the wire loop rotate?
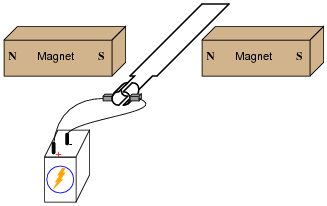
Reveal answerClockwise, continuously.
Notes:Challenge your students with this question: is there any way we can get the wire loop to continuously rotate without using those half-circle metal strips to make and break contact with the battery? Ask your students what the two half-circle metal strips are called, in electric motor/generator terminology.







