 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedinu-blox’s Key to Centimeter-level GNSS Precision? “Real-time Kinematic Corrections”
ArduSimple and u-blox are teaming up with a module and single-board computer for real-time kinematic calculations. The result, they claim, is accurate m^-2 GPS measurements.
A partnership between ArduSimple and u-blox is aiming to bring mass adoption of cm-level accuracy to commercial GNSS applications.

The multi-band GNSS receiver from u-blox offers high-precision positioning in a 17 x 22 x 2.4 mm package. Image used courtesy of u-blox
Last week u-blox released details on the partnership, illuminating the key performance indicators that each party brings to the table.
Single-board Computers Offer Rapid Time to Market
“[High-precision positioning] continues to be held back by one key factor: its increased complexity compared to standard-precision positioning," explains Marc Castillo, senior GNSS consultant for ArduSimple.

The new simpleRTK2B-SBC from ArduSimple. Image used courtesy of ArduSimple
This complexity leads to long development windows, which has slowed integration and market adoption. To solve this problem for the ZED-F9P module, u-blox has released a new SimpleRTK2B single-board computer.
The SBC is available in two variants using x2 or x3 ZED-F9P modules, offering either positioning + heading or a full attitude and heading reference system (AHRS).
What Is Real-time Kinematic Positioning?
Based upon corrected data between a rover (moving object) and base station (true fixed object) real-time kinematics is an algorithmic technique that calculates the position of an object to within ~2 cm of its true location.
The algorithms compute the true location of the rover utilizing a two-reference differential dataset from the base station and a GNSS satellite.

An example of a rover and a base station receiving positional data from a GNSS satellite. Image used courtesy of u-blox
RTK-enabled base station density dictates the accuracy of these measurements as an indication of true position and is limited to approximately 35 km range. However, RTK algorithms can also be used in two alternate positional topologies.
The "moving base" methodology uses a second rover as a base station and calculates the distance of the target vehicle with respect to the reference rover.
NTRIP, which is a network transport protocol for the Radio Technical Commission for Maritime Services (RTCM), allows corrected data to be delivered to the target vehicle via internet services such as the LTE network.

An example of NTRIP, offering RTK without range limitations. Image used courtesy of VBOX Automotive
Breaking Down the u-blox ZED-F9P Chip
There are some interesting details engineers can evaluate by digging into the ZED-F9P integration guide, including security features, independent configuration for multiple GNSS constellations, and details on the RTK RTCM protocol.

The ZED-F9P block diagram, incorporating a traditional dual-band digital radio front-end to capture GNSS data. Image used courtesy of u-blox
Security Monitoring
Important security features are built into the chip, such as spoofing detection and jamming/interference monitoring. These features are managed as system flags that report to the host device when a potential security threat is present.
The system also features secure boot technology, preventing unauthorized firmware from being initialized on the chip.
Flexibility and Management of GNSS Constellations
The ability to enable/disable specific GNSS signals allows for commercial adoption worldwide on a single chipset. Additionally, the chip allows for up to four concurrent constellations to be enabled. This allows multiple satellites to be used to provide an RTK solution.
Finally, designers can tap into potential power savings by disabling unused constellations; the datasheet reports a smaller power consumption when receiving only GPS data.
RTCM Protocols and RTK Acquisition
RTCM is a binary protocol used to communicate between the base station and rover unit. RTCM consists of a series of messages sent between the two units providing a stream of correction data.
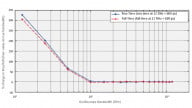
The rover will begin in RTK floating mode, where positional accuracy is limited to traditional GPS precision (2–5 meters). Once the phase ambiguity between the base station and rover has been calculated (10 seconds < convergence time < 30 seconds), the receiver enters RTK fixed-mode and the accuracy reaches cm-level precision.

The optional housing assembly for the simpleRTK2B-SBC. Image used courtesy of ArduSimple
With the goal of mass-market adoption in mind, the new simpleRTK2B-SBC provides designers a way to get m-2 GNSS precision on-board quickly. This is another critical technology for ADAS, autonomous cars and drones, and the logistics industry.
Have you used a single-board computer to accelerate your system designs? Let us know in the comments below.
Related Content










Accuracy of 1 to 2 centimeters will open up the world of self-guided lawn mowers. No more random mowing patterns and all night mowing! Teach it the path by mowing your lawn once.