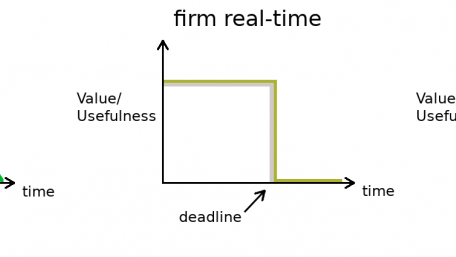
This article looks at real-time embedded systems including classifications, constraints, and design patterns.
This article looks at real-time embedded systems including classifications, constraints, and design patterns.

This article will explain some of the most important settings and design parameters for the Xilinx FFT IP core and…
This article will explain some of the most important settings and design parameters for the Xilinx FFT IP core and function as a basic walkthrough of the Fast Fourier Transform interface.

This article will review integrating a Xilinx IP core into an FPGA design.
This article will review integrating a Xilinx IP core into an FPGA design.

Bluetooth LE was designed with the IoT in mind. Here are some options for troubleshooting your next Bluetooth LE project.
Bluetooth LE was designed with the IoT in mind. Here are some options for troubleshooting your next Bluetooth LE project.

Developing a robot with a computer brain needs a bunch of software tools on the computer side—like software drivers,…
Developing a robot with a computer brain needs a bunch of software tools on the computer side—like software drivers, third party tools for computer vision, simulation tools, and more. ROS framework gathers all these tools and manages how you develop a code for your robot.

In this project, we will demonstrate the simplicity of RIOT by creating a data logger that will plot levels of light onto…
In this project, we will demonstrate the simplicity of RIOT by creating a data logger that will plot levels of light onto a graph on a PC server application.

Using a custom framework (RIOT) to control an LED with a networked computer.
Using a custom framework (RIOT) to control an LED with a networked computer.

The PICAXE 40X2 features 32 I/O ports and speeds up to 64MHz; a development platform simplifies project design using this…
The PICAXE 40X2 features 32 I/O ports and speeds up to 64MHz; a development platform simplifies project design using this workhorse.

This article demonstrates how to use the built-in die temperature sensor on the nRF51. The die temperature is not the…
This article demonstrates how to use the built-in die temperature sensor on the nRF51. The die temperature is not the same as ambient temperature, but can be calibrated to ambient temperature by using a correction factor.

How to add BLE capabilities to a wireless ceiling fan by incorporating the nRF51 in the remote control. Part of our…
How to add BLE capabilities to a wireless ceiling fan by incorporating the nRF51 in the remote control. Part of our series on the nRF51.

This article demonstrates porting FreeRTOS to the nRF51 with a softdevice so you can use an RTOS with the BLE functionality.
This article demonstrates porting FreeRTOS to the nRF51 with a softdevice so you can use an RTOS with the BLE functionality.

How to create a custom BLE GATT peripheral using the nRF51 by creating a service and characteristics.
How to create a custom BLE GATT peripheral using the nRF51 by creating a service and characteristics.

Learn how to communicate with a custom BLE peripheral using an Android device.
Learn how to communicate with a custom BLE peripheral using an Android device.

LCDs are great for showing info from your microcontroller. A serial adapter is inexpensive, uses only one I/O, and is…
LCDs are great for showing info from your microcontroller. A serial adapter is inexpensive, uses only one I/O, and is easy to connect and to use.

How to set up the build environment for the nRF51 system-on-chip using makefiles and ARM-GCC.
How to set up the build environment for the nRF51 system-on-chip using makefiles and ARM-GCC.

When you buy a Raspberry Pi, you just buy a printed circuit board which doesn’t even come with a power supply or…
When you buy a Raspberry Pi, you just buy a printed circuit board which doesn’t even come with a power supply or operating system. This tutorial is concerned with getting your Raspberry Pi set up and ready to use.
 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin